TWS (Track While Scan:捜索中追尾) モードではレーダーレンジが46nm(約85km)以内で最大10目標を追尾し8目標を同時攻撃可能な能力を有しており、特にAIM-120で複数目標を同時攻撃する際に使用します。

RWSモードにくらべ状況の把握がしやすい反面、走査できる範囲が限定されます。
TWSモードで設定可能なアジマスとバーの組み合わせは20°/2~6BAR、40°/2~4BAR、60°/2BAR、80°/2BARのみです。
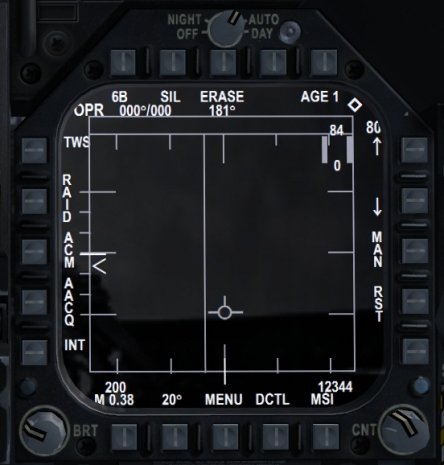
DDI画面の左上(青枠)にレーダーの作動状態(OPR:正常)が表示されています。
OPR:正常に動作しています。
SIL:サイレントモードになっています。
STBY:待機状態になっています。レーダー波は放射していません。
OFF:オフになっています。
RDY:故障しています。
機体の状態として、自機の現在の「画面左下:対気速度(kt)・マッハ数」、「画面上:方位(度)」、「画面右上:選択中の武装と残弾数」、「画面右下:高度(ft)」が表示(赤枠)されています。
プッシュボタンの機能は次の通りです。
- [ PB1 ] INT / MID / HI
- ボタンを押すことでPRF(Pulse Repetition Frequency:パルス繰り返し周波数)をINT / MID / HIに切り替えられます。
・INT(交互)はHIとMIDを交互に使用するモードです。右から左へHIで走査をしたら、左から右へはMIDで走査を行うというように高・中PRFが交互に使用されるので遠くの目標も低速の目標も探知できる可能性があります。
・MID(中)PRFは高PRFよりも接近速度が遅い目標を探知する能力に優れていますが、その分遠くの目標の探知能力が劣ります。
・HI(高)PRFは特に遠距離から高速で接近してくる目標の探知に威力を発揮します。しかし接近速度の低い目標は探知し難いためヘリコプターのような低速機や高速機でも横や後ろを向いている場合は発見できなくなります。
レーダーの感度は高いほど遠くの目標やRCSの小さい目標が探知しやすくなりますが、目標以外からの放射に惑わされやすくなります。低空を飛行したりジャミングを受けると感度は小さくなります。 - [ PB2 ] AACQ / WACQ / VACQ / BST 各捕捉モード
- ・AACQ(Auto Acquisition:RWS、VS、TWSで使う自動捕捉機能)
RWS、VSでは目標を捕捉すると自動的にSTTモードに入る。TWSでは優先目標を捕捉する。
・WACQ(Wide Acquisition:広域捕捉)
・VACQ(Vertical Acquisition:垂直捕捉)
アジマスを小さくして垂直方向のサーチにして、機首軸線上に敵機を持ってくるようにすれば簡単にロックオンできます。
・BST(Boresight Acquisition:照準捕捉)
近接目の前に見えている目標をすばやくロックするのに有効なモードです。 - [ PB3 ] ACM(Air Combat Maneuvering:空戦機動)モード
- このボタンをクリックすると最初に見つけた航空機にロックオンします。10NM以内でドッグファイト向きのモードです。
- [ PB4 ] RAID(RAIDオプション)
- このオプションをオンにするとTWSはL&Sターゲットの周囲を拡大表示します。SCAN RAIDの間は走査はL&Sターゲットを中心としたアジマス22°、3バーとなります。
※TWS SCAN RAIDを使用すれば密集編隊を組んでいる目標でも1機1機を分離して表示させることができます。 - [ PB5 ] RWS / TWS / VS レーダーサブモード
- 現在のレーダーサブモードが表示されています。ボタンを押すとサブモードはRWS/TWS/VSと切り換わります。
・RWS (Range While Search:捜索中測距) モード
標準的な空対空レーダーモードです。広範囲の目標探知能力に優れています。
・TWS (Track While Scan:捜索中追尾) モード
最大10目標を追尾し8目標を同時攻撃可能で、特にAIM-120で複数目標を同時攻撃する際に使用します。RWSにくらべ状況の把握がしやすい反面、走査できる範囲が限定されます。
・VS (Velocity Search:速度捜索)モード
接近する目標に対しては最も探知能力が高く、接近速度が80~2400ノットの目標を探知します。他のモードと異なりDDI画面で目標表示位置の縦軸は速度になります。 - [ PB6 ] 2B / 4B / 6B(Elevation Scan Volum:エレベーション・バー設定)
- レーダーが走査を行なうバーを設定します。ディフォルトでは6Bです。バー(BAR)とはレーダーが走査する垂直方向の範囲(角度)です。通常レーダーはアンテナが左右へ首振りを行なうことで水平方向(アジマス)の走査を行ないますが、垂直方向の広い範囲を走査するためにはアンテナを垂直方向にも動かす必要があります。そこで1度右から左への水平走査が終わったらアンテナを上(もしくは下)に傾けてから次の左から右への水平走査を行なうようにしてより上(下)の目標が発見できるようにします。つまり4バー走査であればこの上下へのアンテナの動きを4回行なうことで、4バー走査は2バー走査よりも2倍垂直に広い範囲を走査することになります。ただし走査範囲を広げると全てを走査し終わるのに時間がかかるようになり、目標の最新位置が更新されるのが遅くなってしまいます。
- [ PB7 ] SIL(Silent:サイレント)モード
- レーダー波の放射を停止します。サイレントモードにすることで敵のレーダー脅威装置に探知されることが避けられますが、当然その間レーダーは使えなくなります。EMCONとは異なりジャマーなど他の電波放射は行なえます。
- [ PB8 ] ERASE(フレーム消去)
- ボタンを押すと現在表示されているレーダーコンタクト表示(フレーム)をすべて消去します。
- [ PB9 ] UNK(目標識別情報)
- L&Sターゲットを識別を試みます。識別の結果はPB9下のID情報表示エリアに表示されます。ID情報表示エリアには識別された目標の種類と解析度が表示されます。解析度が50%になるまでは種類不明を示すUNKが表示されます。
- [ PB10 ] AGE X(Target Aging:表示フレーム数設定)
- 最新の走査で探知された目標(レーダーコンタクト)は明るい点で表示されますが、前回の走査で探知された目標も暗い点で重ねて表示されます。これにより目標のそれまでの位置が分かるので視覚的に目標の動きを推測することができます。ボタンを押すことで表示フレーム数を変更できます。4にした場合は過去4回の走査で得られた情報がすべて表示されることになりますが、あまり大きく設定すると画面がレーダーコンタクトだらけになり見づらくなるので注意が必要です。
- [ PB11/12 ] ↑ / ↓(表示範囲設定)
- レーダースクリーンに表示する範囲(距離)を設定します。より遠くの目標を発見するためには範囲を大きくし、近くの空域を詳細に見るためには範囲を小さくします。
- [ PB13 ] MAN / AUT(走査範囲設定切換え)
- RWSモードで走査する範囲の中心(方位とチルト角)の設定を自動で行うか手動で行うかを切り換えます。ボタンを押すことで自動(AUT)と手動(MAN)に切り替わります。自動の場合は中心は走査範囲に多くの目標が入るように自動的に設定されます。
- [ PB14 ] RST(ターゲットリセット)
- ボタンを押すとL&Sターゲットの指示が解除されます。
- [ PB16 ] MSI(Multi-Sensor Integration:マルチセンサー統合)
- このオプションをオンにするとレーダースクリーンには自機のレーダーで捕らえた目標だけでなく、データリンクで送られてきた目標(主にAEWやAWACS等が捕らえている目標)もあわせて表示されます。データリンクターゲットもレーダー目標同様に目標指示することが可能です。
- [ PB17 ] DCTL(Declutter:デクラッター)
- レーダースクリーン(DDI)には様々な情報が表示されるため、時としてそれらがごちゃごちゃして非常に見づらくなる場合があります。そこでボタンを押すと特に必要ではない情報(シンボル)を取り除き、表示をすっきりさせ見やすくします。
※VRS F/A-18Eでの表示はDCTLですが、もしかしたらDCLTじゃないのかな? - [ PB18 ] MENU
- メインメニューに戻ります。
- [ PB19 ] 20°(Azimuth Scan Volume:アジマス設定)
- レーダー走査する水平方向の範囲(アジマス)を設定します。ボタンを押すことで20/40/60/80°のいずれかに切り換えることができます。アジマスを大きくすればそれだけ広い範囲を監視することができますが、その分全ての走査を終えるのに時間がかかってしまいます。


コメント